
Welcome to Manifold, we're excited to share our eleventh Research Log!
The Research Log is basically a weekly update on all the progress we're making in building next generation Intelligent Systems, and we also share what we've been finding interesting in the broader research community in the "Pulse of AI" section that follows.
Let's begin!
NEKO Project
The NEKO Project aims to build the first large scale, Open Source "Generalist" Model, trained on numerous modalities. You can learn more about it here.
Game Performance reaches a Promising High Score
The Control thrust has resulted in successful training of the NEKO model on Atari Game data. In the most recent tests, the model achieved a score of 317, which compares favorable to SoTA. Future work includes investigation into the stability of the model across training, as well as training across more games. The team has also implemented a new data sampling method, which has sped up training significantly. Check out our work here:
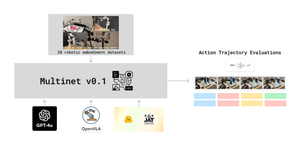
 ManifoldRG
ManifoldRGImage/Text Grounding Dev Work is Underway
The Image/Text grounding implementation has begun, and text modality work is steadily underway! See our progress here:
ManifoldRGPulse of AI
Last week, we mentioned DALLE-3 coming out as a sign that OpenAI was pushing strongly towards multimodality. Sure enough, this week OpenAI has announced GPT-4V, which "enables users to instruct GPT-4 to analyze image inputs provided by the user".

We have a few more interesting things we've been reading this week, check them out!


If you got this far, consider giving us a follow on Twitter, Linkedin, and Mastodon!